
WELCOME TO ROVERCON SYSTEM
By combining modular hardware, real-time ESP32 microcontrollers, and a powerful Radxa Cubie single-board computer, the rover delivers precise control, advanced processing, and fully synchronized data across all systems.
Built modular Built to evolve
The rover is constructed from independent, swappable modules, making upgrades, repairs, and experimentation fast and painless.
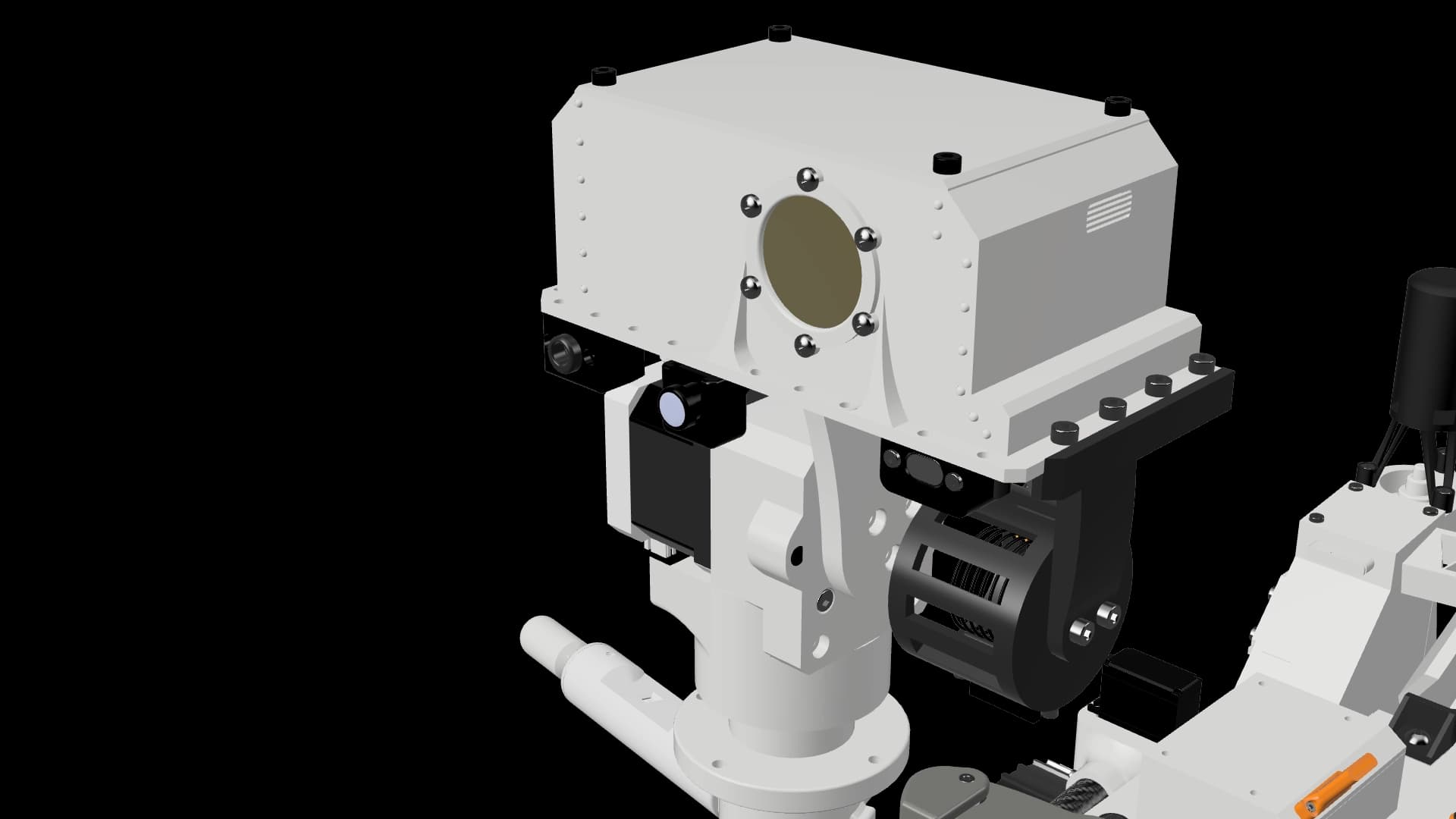
SuperCam
Super Cam is a component created for transmitting video, navigation, and precise distance measurements. With a dedicated TOF sensor, it can measure distances up to 4 meters with high accuracy, providing precise data for navigation algorithms. It has 3 cameras on board—two for navigation and one for gathering IR images. With such a set of instruments, we can see the space around the rover even in IR.
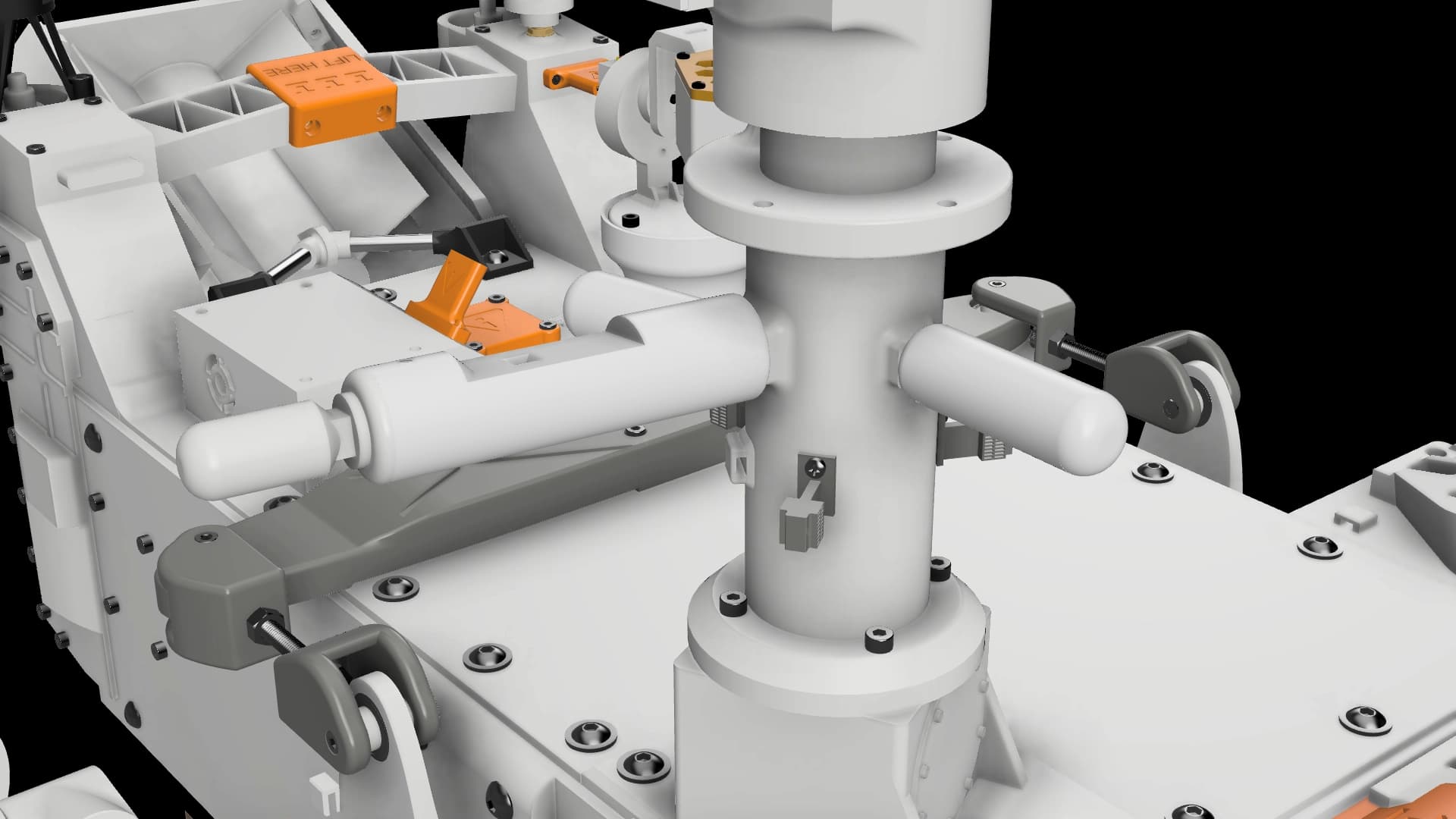
MEDA
MEDA is a component designed to provide precise and specific environmental data regarding the temperature, humidity, pressure, air quality, height above sea level, and background radiation. With sensors such as, for example, the DHT11 and BMP180, we can see precise information about climate conditions around the rover and use them for creating complex reports of, for example, background radiation in a designated area.
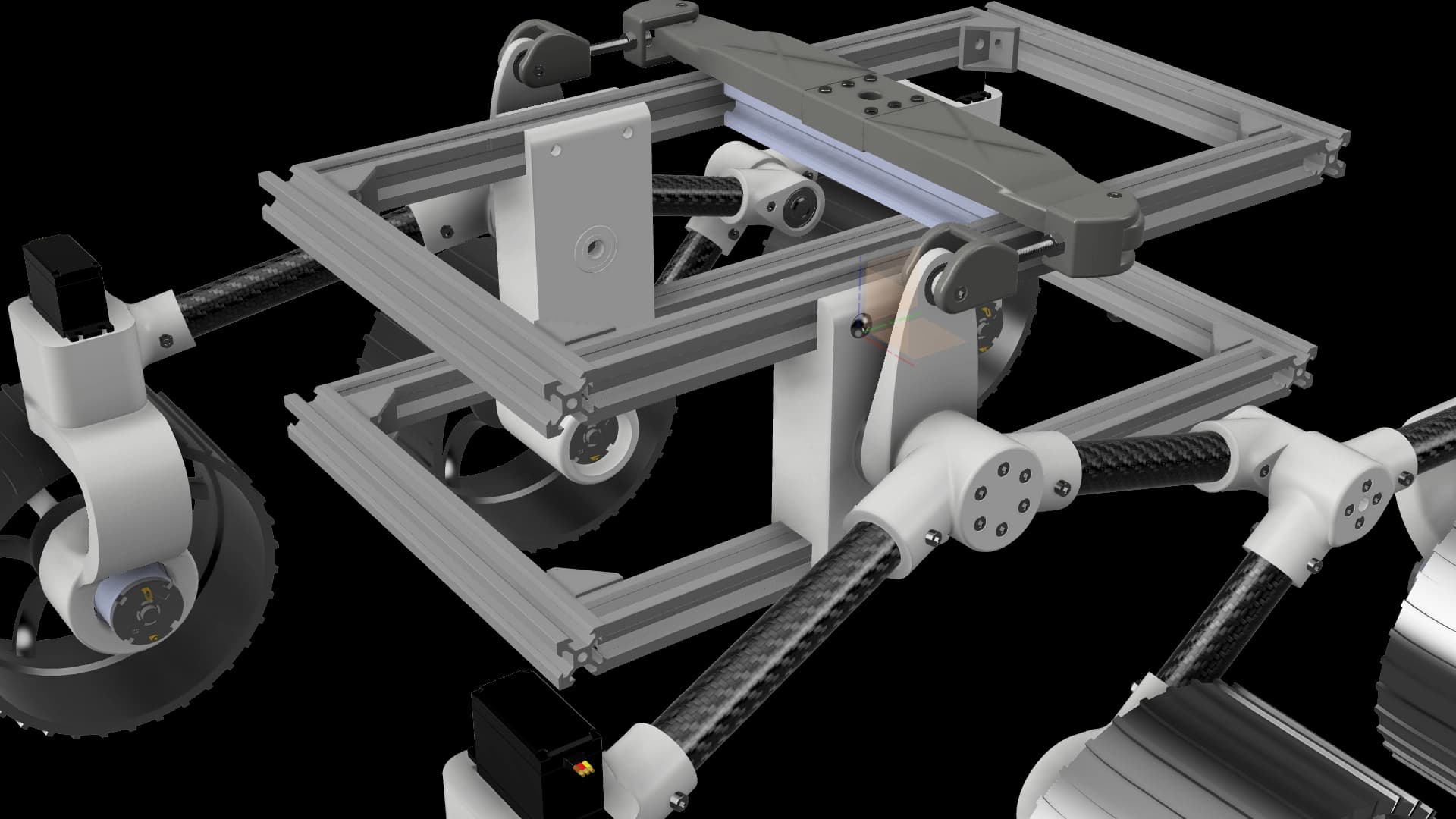
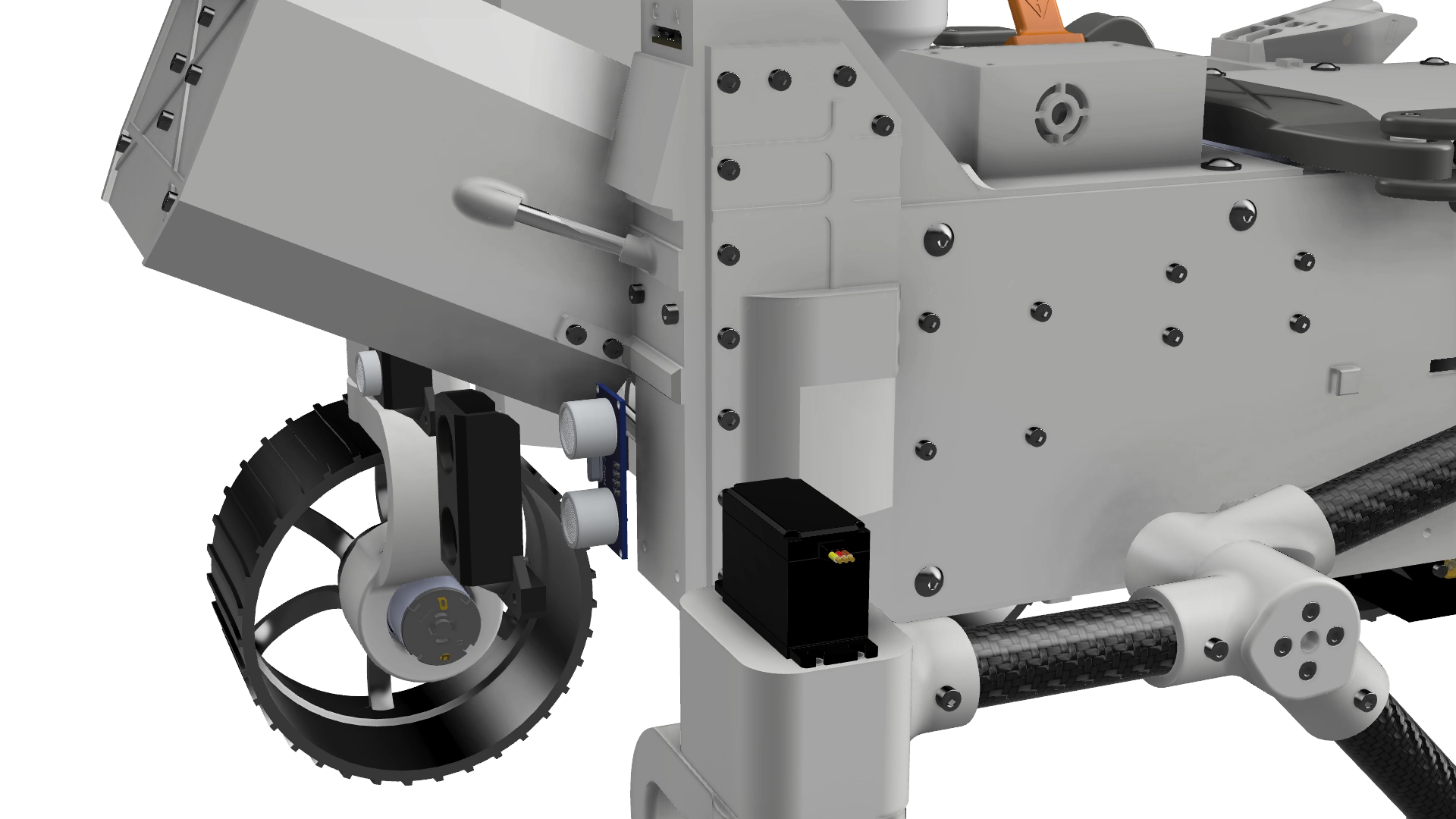
Chassis system
The chassis system is a fundamental part of rover construction, providing a stable platform for operation in various environments. Rocker buggy suspension means that all the wheels will be in contact with the ground and the solid aluminum frame makes that construction resistant to mechanical damage. Rover speed is small, around 0.2 km/h in average, but it has a huge amount of torque for overcoming every obstacle.
Developed using modern tools and technologies
Where data becomes decisions
Turn complex streams of data into clear, actionable decisions. With real-time monitoring, detailed analytics, and intuitive visualization, you always know what’s happening—and what to do next.